02. 课程概述
课程概述
## 课程大纲
1. 里程表、速度表和导数

理解运动意味着理解位置、速度和加速度之类的量以及它们之间的关联。事实证明微积分为我们提供了有助于理解这些关系的两种不可思议的工具: 导数 和 积分 。
本课中,你将学习 导数 以及导数能告诉我们与运动相关的知识。在本课结束时,你将能够掌握汽车的 里程表数据 (行驶距离),并用它来推断关于速度和加速度的新知识。
2. 加速度计、速率陀螺仪和积分
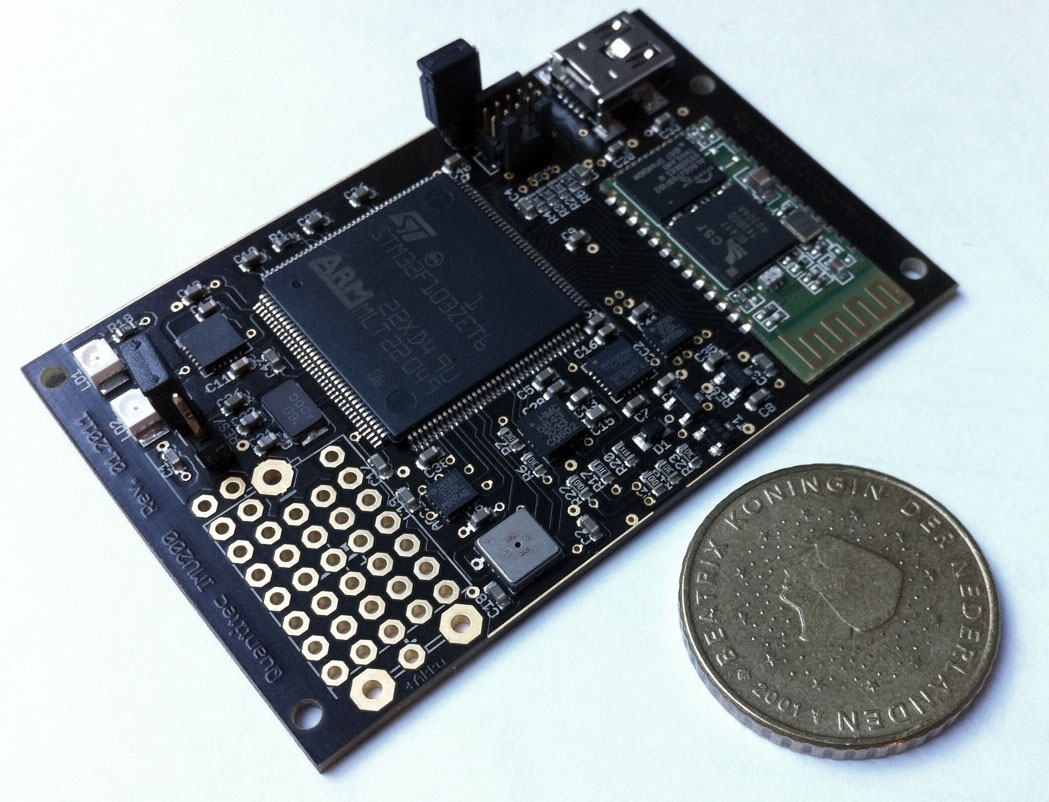
每辆无人驾驶车都至少有一个 惯性测量单元 。这些小型传感器可以测量三个方向的加速度以及三个轴(纵倾、横倾、横摆)的转速。
但是,我们可以用这些数据做什么?在本课中,你将学习如何使用 积分 来积累数据(和运动)的变化。
3. 二维机器人运动与三角学
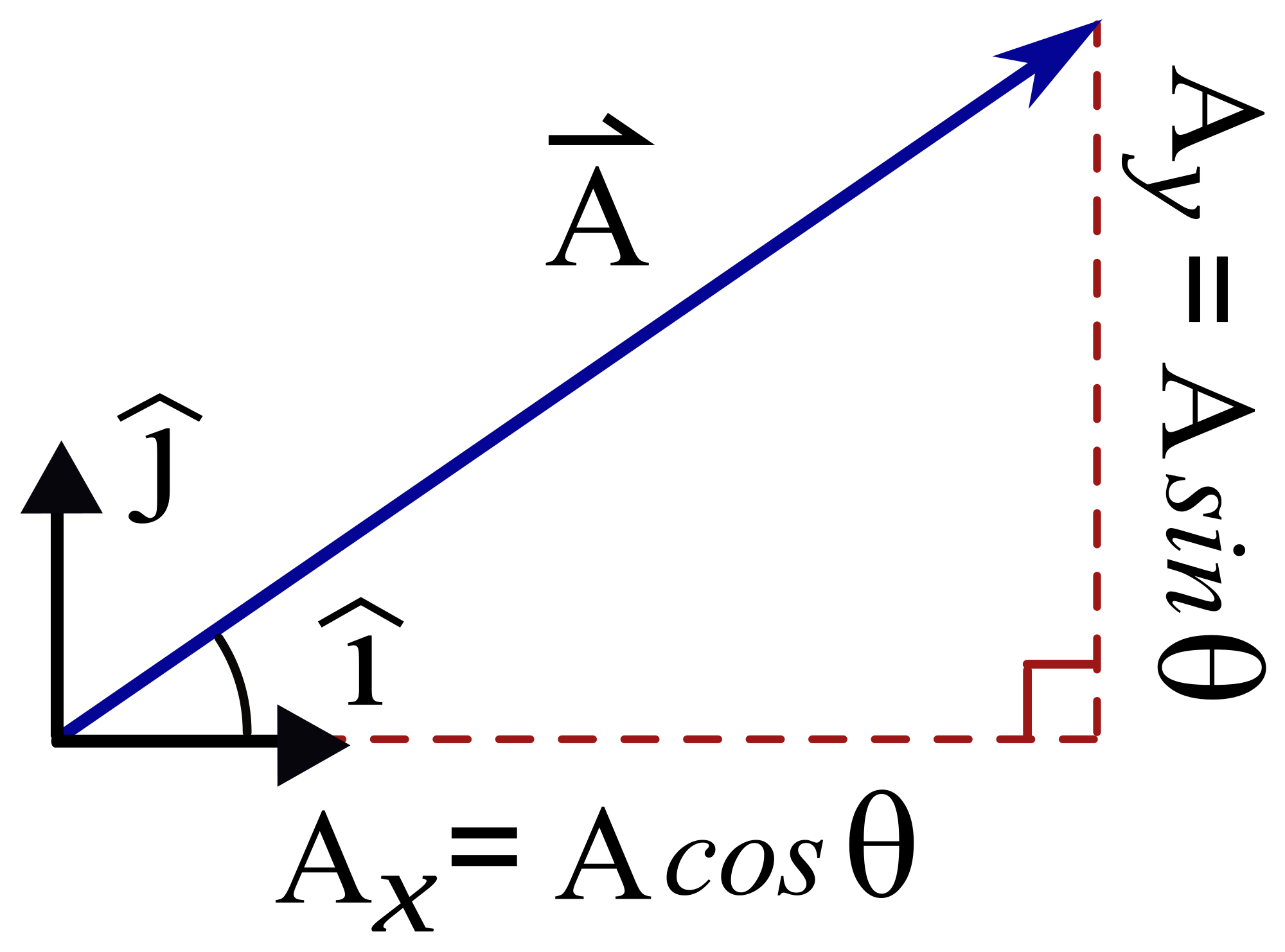
在本课中,你将使用有关车辆 方向 和 位置 的知识来计算其运动的水平和垂直变化。
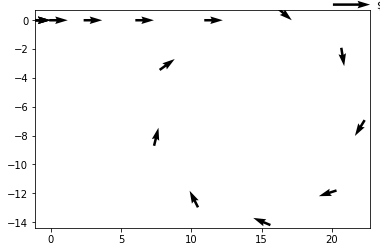
4. LAB - 重建轨迹
在本课程的(可选)最后设计中,你将使用如下类似数据。
| 时间戳 | 位移 | 偏航_速率 | 加速度 |
|---|---|---|---|
| 0.0 | 0 | 0.0 | 0.0 |
| 0.25 | 0.0 | 0.0 | 19.6 |
| 0.5 | 1.225 | 0.0 | 19.6 |
| 0.75 | 3.675 | 0.0 | 19.6 |
| 1.0 | 7.35 | 0.0 | 19.6 |
| 1.25 | 12.25 | 0.0 | 0.0 |
| 1.5 | 17.15 | -2.829 | 0.0 |
| 1.75 | 22.05 | -2.829 | 0.0 |
| 2.0 | 26.95 | -2.829 | 0.0 |
| 2.25 | 31.85 | -2.829 | 0.0 |
| 2.5 | 36.75 | -2.829 | 0.0 |
重建如下类似车辆轨迹的平面图: